



随着科技的发展,机器人行业作为一个新兴热门行业而崛起,在全球高科技项目市场中倍受追捧。 而在智能机器人的控制中,传感器起了至关重要的作用。正因为有了传感器,机器人才具备了类似人类的知觉功能和反应能力。根据检测对象的不同可分为内部传感器(检测机器人自身状态的传感器,如:位置传感器与角度传感器)和外部传感器(检测机器人所处环境及状况的传感器,如:视觉传感器、听觉传感器)。
天津诺沃泰克自动化技术有限公司是机电一体化技术、电子信息技术的开发、咨询、服务型公司。目前本公司授权代理德国Novotechnik品牌的接触式及非接触式位移传感器、角度传感器等产品。并分销瑞士各类直线及角度光栅尺,以满足客户的不同需求。
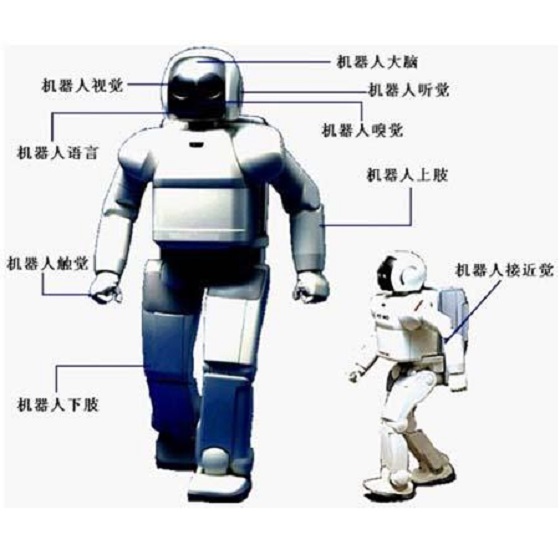
智能机器人常用传感器分布图
内部传感器:
机器人是机电一体化的产品,内部传感器与电机、轴等机械部件或机械结构如手臂、手腕等安装在一起,完成位置、速度、力度的测量,实现伺服控制。
位置(位移)传感器
常用的位置传感器(位移传感器)有直线位移传感器与角位移传感器(角度传感器)。直线位移传感器常用电位计原理直线位移传感器(电子尺),角位移传感器常用导电塑料角度传感器、磁敏霍尔原理角度传感器及光电编码器三种。
速度和加速度传感器


速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。常用光电脉冲式转速传感器与测速发电机测量速度,应变仪与伺服加速度传感器测量加速度。
力觉传感器
力觉传感器用于测量两物体之间作用力和力矩。常用半导体应力计、转矩传感器测量。
外部传感器:
早期的工业机器人是没有外部感觉能力的,而新一代智能机器人则要求具有校正能力和反应环境变化的能力,外部传感器就是实现这些能力的。
触觉传感器
微型开关是接触传感器最常用型式,其他还有隔离式双态接触传感器、单模拟量传感器、矩阵传感器。
应力传感器
应变仪常用于应力测量。


接近度传感器
超声波接近度传感器多用于远距离测量或者智能机器人超声导航系统。近距离测量需要使用体积较小的电涡流传感器或者红外线接近度传感器。
声觉传感器
声波传感器复杂程度可以从简单的声波存在检测到复杂的声波频率分析,直到对连续自然语言中单独语音和词汇的辨别。
接触式或非接触式温度传感器
常用热电阻(热敏电阻)、热电偶,此外热电电视摄像机测及感觉温度图像方面也取得进展。
滑觉传感器
利用光学系统的滑觉传感器和利用晶体接收器的滑觉传感器,后者的检测灵敏度与滑动方向无关。
距离传感器
用于智能移动机器人的距离传感器有:激光测距仪(兼可测角)、声纳传感器等。
视觉传感器
视觉传感器应用较为广泛,而且经常独立形成产品,与软件技术关系密切。